Quand la robotique s’inspire de la nature
Les roboticiens le savent bien, biomimétisme rime souvent avec efficacité. Les derniers développements des laboratoires du monde entier regroupés dans cette note de veille le prouvent une fois de plus. Exemple avec l’actionneur mis au point par une équipe du Harvard Wist Institute (USA). Constitué de chambres creuses dans un nid d’abeilles en élastomère, ce dispositif qui imite le muscle naturel se rapproche du biceps humain en temps de réaction et en efficacité. Egalement inspiré de la nature, l’algorithme d’apprentissage mis au point par des chercheurs franco-américains de l’université Pierre et Marie Curie à Paris et de l’université du Wyoming à Laramie aux Etats-Unis, permet à un robot, comme un animal blessé, d’adapter rapidement sa marche en fonction d’avaries de fonctionnement qu’il détecte.
Se déplacer comme des animaux.
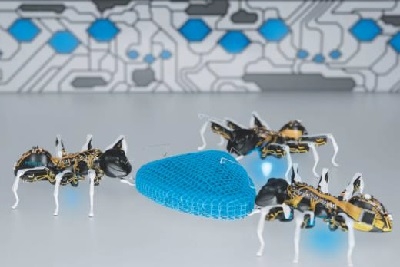
Pour se déplacer, le « robot-ver » de l’équipe SoftWorm de l'Université Case Western Reserve de Cleveland (Etats-Unis), reprend ainsi le principe du péristaltisme (combinaison de contraction musculaire à l’intérieur d’un organe) utilisé par les vers de terre. Sa motricité en espace restreint pourrait lui ouvrir les portes de nombreuses applications civiles et militaires. Equipés de six pattes, les « robots-cafards » VélociRoACH du Biomimetic Millisystems Lab de la Berkeley University of California (USA) peuvent atteindre 17,6 km/h et se faufiler dans les milieux encombrés. Et en combinant leurs efforts, ils peuvent aller encore plus loin… Comme les fourmis mécaniques développées par Festo dans le cadre du projet BionicsANTS, qui s’organisent, comme leurs cousines vivantes pour réaliser à plusieurs des tâches complexes.
Pour grimper aux murs comme les insectes, le robot mis au point par le centre de recherche et d’innovation SRI International (USA) utilise une technologie brevetée d’électro adhésion. Et il peut porter 200 g de 10 à 15 cm et 1 kg à 2 cm de la paroi escaladée! La machine de Disney Research et de l’ETH de Zurich (CH) combine pour sa part quatre roues légères et deux hélices qui la plaquent au mur, et même au plafond. Comme certains animaux, les robots empruntent aussi des stratégies multimodales. Le Scamp (Stanford Climbing and Aerial Maneuvering Platform) développé par le Stanford’s Biomimetics and Dexterous Manipulation Lab, aux Etats-Unis, combine ainsi le vol et l’accostage en environnement extérieur non structuré. Autrement dit, ce drone vole et, lorsqu’il rencontre un mur, se pose à la verticale et utilise ses pattes. Les chercheurs du laboratoire de GRASP de l'Université de Pennsylvanie (USA) ont, pour leur part, conçu un micro robot appelé Pico Bug capable de progresser jusqu’à 6 m/s en vol et 0,16 m/s sur ses pattes. La combinaison des modes de progression permet de franchir certains obstacles. Enfin, l’AquaMAV de l'Imperial College de Londres vole et plonge comme un oiseau dans une zone aquatique où il pourrait recueillir des échantillons ou des images vidéo sous-marines.
Vers des machines auto-alimentées
Dans la nature, les roboticiens trouvent aussi des modèles en termes de gestion d’énergie. A l’image du BionicKangaroo de Festo, qui imite le vrai Kangourou pour optimiser ses sauts. Le Row-Bot, développé par l’Université de Bristol, le Bristol Centre BioEnergy et le Bristol Robotics Laboratory (UK) s’alimente… en mangeant. Il tire son énergie uniquement de l’électricité générée par la digestion de polluants par des bactéries qu’il embarque. Et l’énergie produite par la cellule est supérieure à l’énergie consommée par le robot. Une porte ouverte sur le développement de robots autonomes…
Retrouvez l’intégralité de la note de veille « Robotique bio-inspirée et concepts robotiques innovants » sur le site du Cetim, rubrique « Mécathèque ».